
Team History
AutoBoat Was Founded
The team previously competed in NASA’s Micro-G competition which had a mechanical focus. In 2021 the team pivoted to a more software-heavy competition, RoboBoat.
The First Boat Prototype
We built the first prototype of our boat, transitioning from a catamaran to a more stable trimaran design. While the mechanical team led this shift, the software team focused on developing path planning algorithms and a computer vision model. We also began integrating ROS into our system.

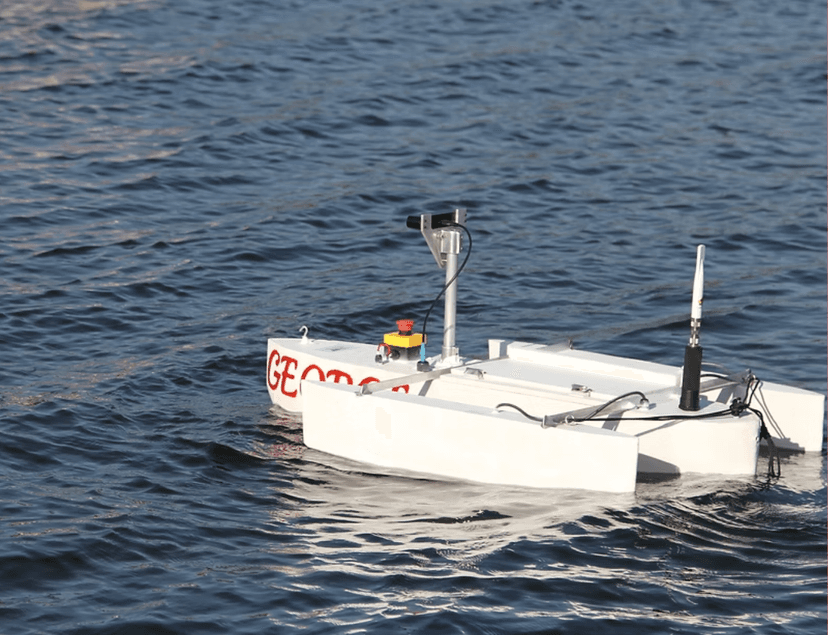
George
Our first competition boat, George, was built. Our CV model was completed, and the code for the navigational tasks was finished. We competed in-person at RoboBoat for the first time, and qualified for finals. We learned so much from the competition and came back with many ideas to improve the team moving forward.
Clifford
RoboBoat 2024 would take place nearly two months earlier than expected. Despite this, we still decided to build an entirely new boat, Clifford, which was fully designed and manufactured in just one semester. Clifford is stronger, faster, and more stable than George, providing the team with a more reliable hardware platform to build upon in the future. The software team revamped the codebase, integrated a compass and GPS, and improved the vision models. Additionally, the Ground Station project and virtual simulations were developed. At competition, we qualified for finals again, and we won a design documentation award for our website.

International Champions
Spring 2025 marked a defining milestone for Cornell AutoBoat. Building on our design and testing from the fall, the team competed at RoboBoat and earned an international fifth place finish! This achievement reflected significant improvements across all subteams. Beyond competition results, this season demonstrated the team’s progress, and setting a strong foundation for the upcoming year.

Preparing for roboboat 2026
During Fall 2025, the team continued to work with Clifford to validate new hardware and software developments, in preparation for our new boat Scooby. This semester emphasized extensive on-water testing, sensor calibration, and refinement of our ROS-based autonomy, including improved perception pipelines, navigation logic, and GPS/IMU integration. Electrical, mechanical, and robotics updates focused on new design decisions for Scooby. The insights gained from testing on Clifford and the addition of new competition tasks guided our improvements throughout the semester.
Scooby
UPCOMING: Scooby is the product of key advancements for the team, marking the debut of a new sensor suite, optimized geometry, and an upgraded electrical system.
