RoboBoat Competition

RoboBoat 2026
RoboBoat is an international marine robotics competition, run by RoboNation. Each team builds an Autonomous Surface Vehicle (ASV) around 3 feet wide and 5 feet long. Over the course of a week, each ASV must complete a variety of different challenges.
Learn More About RoboBoat
Navigational Tasks
Testing precision, perception, and autonomous navigation capabilities
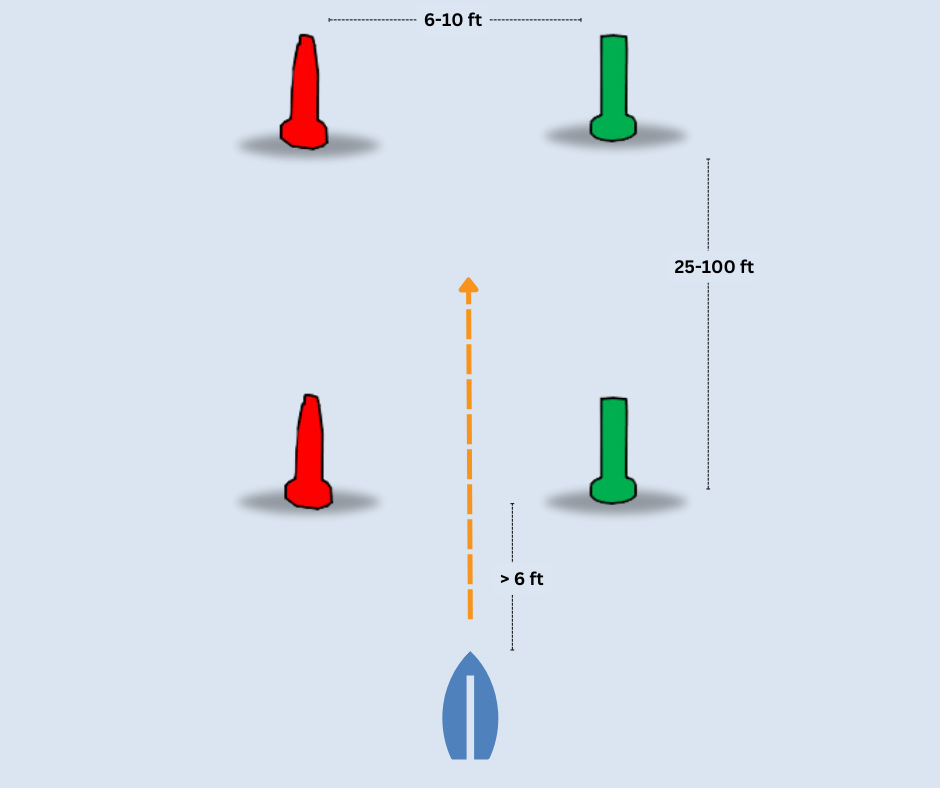
Evacuation Route
ASV safely transits through entrance and exit gates at start/end of run.
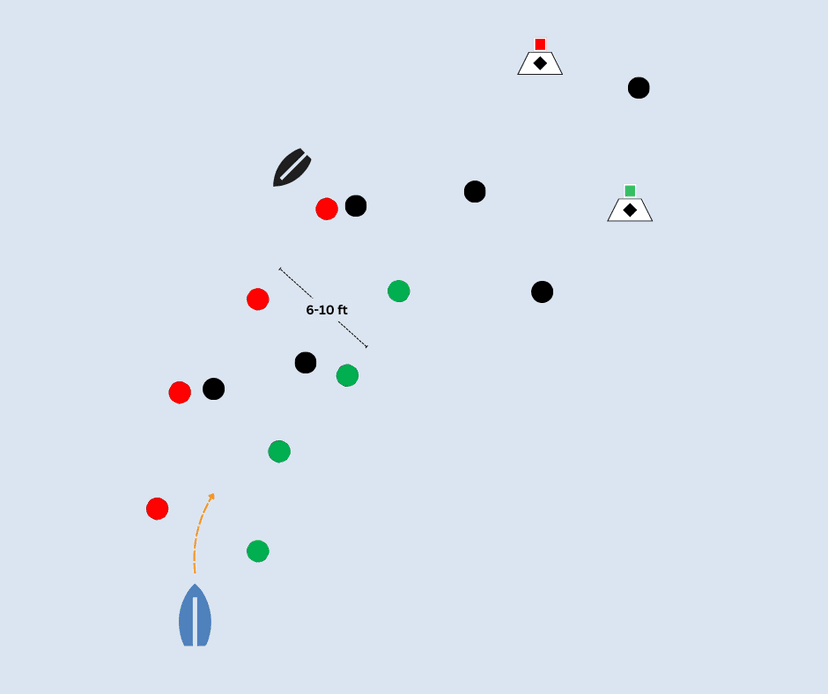
Debris Clearance
ASV navigates through channel to debris field, and scans for floating hazards.
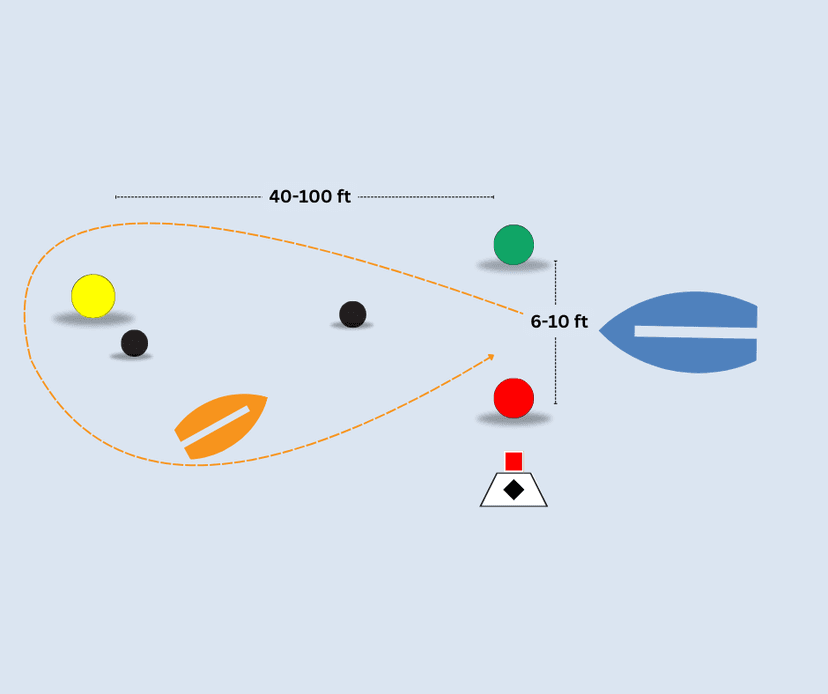
Emergency Response Sprint
ASV sprints to the distress zone, circles the light buoy correctly, and exits back through the buoys.
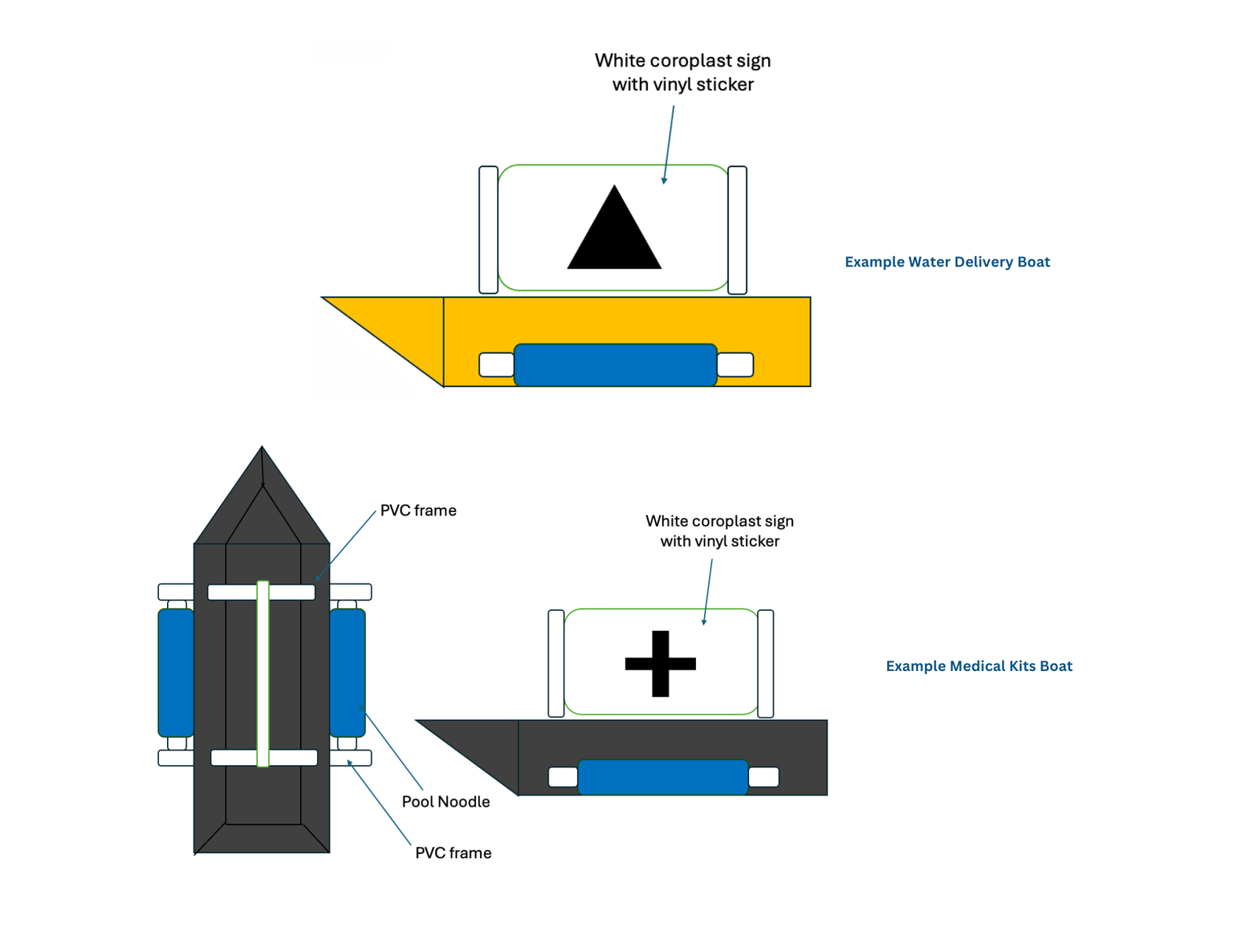
Supply Drop
ASV delivers water and racquetball supplies to stationary vessels throughout course.
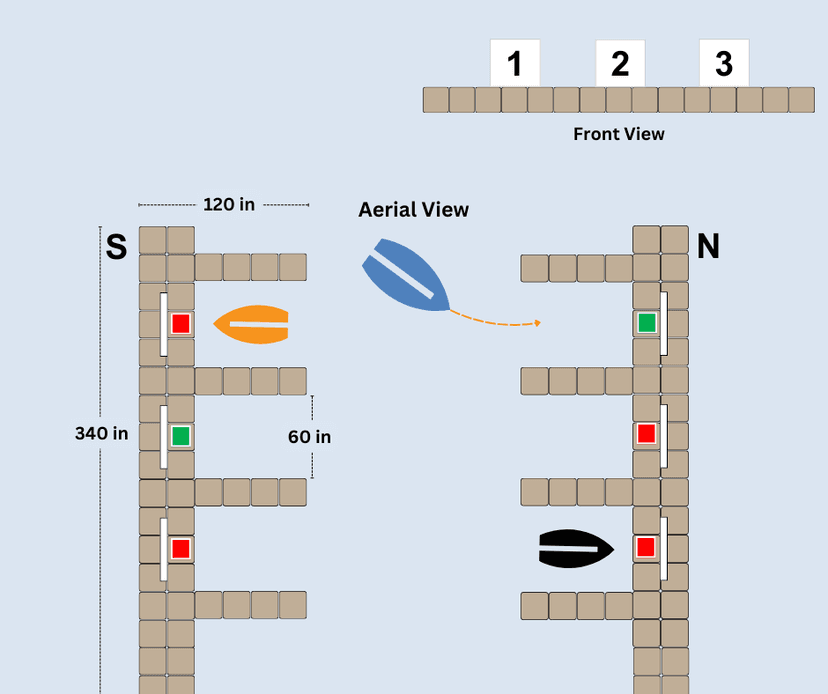
Navigate the Marina
ASV enters marina and docks in an unoccupied slip.

Communications & Reporting
ASV reports on any given task: time stamp, lat/long locations, number or color of object.

Harbor Alert
ASV responds to emergency audio signal.
The navigational tasks test the boat's ability to see and recognize obstacles, plan a path around them, and then execute that plan. In order to successfully complete these challenges, the computer vision, path planning, and path execution/controls algorithms must be working perfectly in sync within the onboard operating system. Mechanically, the boat must remain stable in order for the cameras and sensors to be able to see clearly, and the propulsion systems must be able to produce consistent and reliable thrust.