
Perception

The Perception team is responsible for classifying objects detected by our LIDAR system.
Computer Vision
This year, our perception pipeline underwent a major architectural shift by integrating Light Detection and Ranging (LIDAR) as a primary detection modality alongside our existing computer vision (CV) stack. Instead of relying exclusively on You Only Look Once (YOLO) neural networks for both detection and classification, as we have done in previous years, we now decouple these tasks across two specialized subsystems: LIDAR handles object detection and localization. At the same time, our CV models are used solely for classifying pre-detected regions of interest.
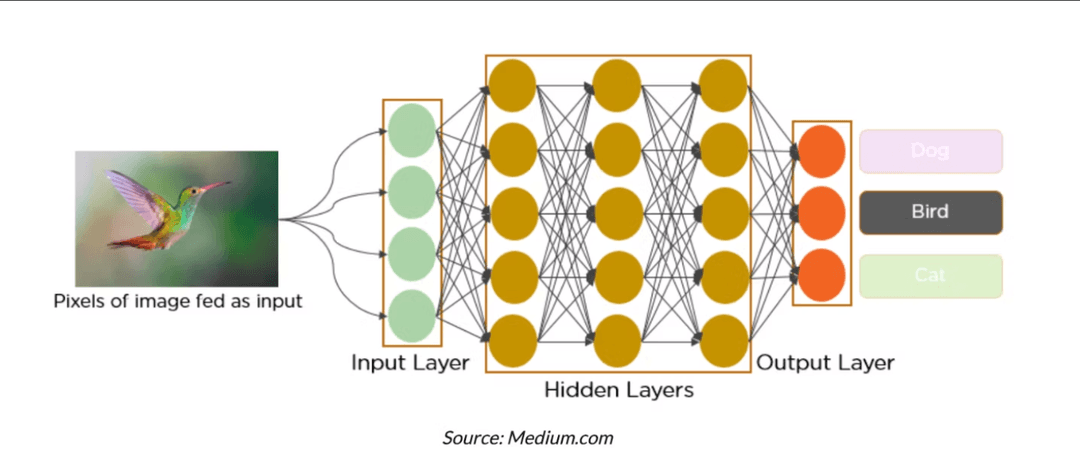
Our CV model combines 3 separate models: buoy classification, sign classification, and beacon classification. For the buoy classification model (YOLOv8 neural network), our data comprises images that we have gotten from previous competitions and current testing videos that we have recorded through our Zed 2i camera. For the sign classification model (YOLOv8 neural network), we do have the black triangle, cross, and circle image data from the last competition, but we used a public TMNIST dataset for images of black font 1, 2, and 3s on a white background, analogous to the numerical signs that we will see. For classifying the beacons by color, we use OpenCV to get the average color inside the passed ‘bounding box’ and sequentially classify it as red or green.
Lidar
We expand our ROS infrastructure to support the multi-model system: we start with the main_perception node, which is the central orchestrator of the perception pipeline via launching and managing all perception-related nodes. Requests are routed between LiDAR, the classifiers’ specific nodes, and the buffer service. Using synchronized timestamps across all sensor inputs, when LiDAR detects an object, it will request a ‘service’ from the appropriate classifier’s node to give back a classification. Synchronized timestamps enable LiDAR and CV to communicate while referencing the same frame.
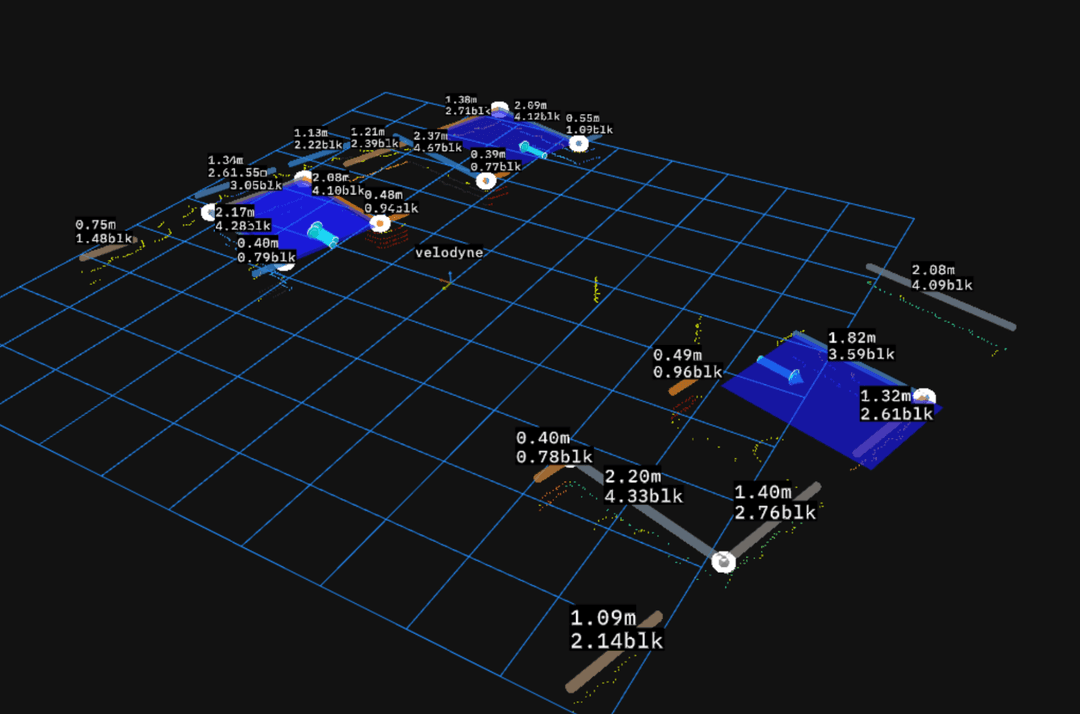
The LIDAR team works closely with the controls subteam in order to develop sensor fusion algorithms, which not only merges the LIDAR data with the other sensor data to evaluate game state, but also to leverage the LIDAR data to enhance the capabilities of our other sensors. For example, the LIDAR provides accurate information about regions of interest for our computer vision models.
The LIDAR project catalyzed the development of our 3D simulation system, which is able to provide simulated LIDAR, positioning, and image data in order to test our code despite limitations in our indoor and outdoor testing environments.