Robotics

The Robotics subteam builds everything on the boat that moves, launches, grabs, or interacts with the world. We are a hardware-first team of mechanical and electrical engineers who believe in rapid prototyping, fast iteration, and learning by trying. While we collaborate with the Controls subteam for ROS integration, our primary focus is mechanisms, materials, testing, and building real systems.
We own the three major interaction tasks for the Roboboat competition:
- Watergun system
- Skeeball shooter
- Robotic arm
Watergun System
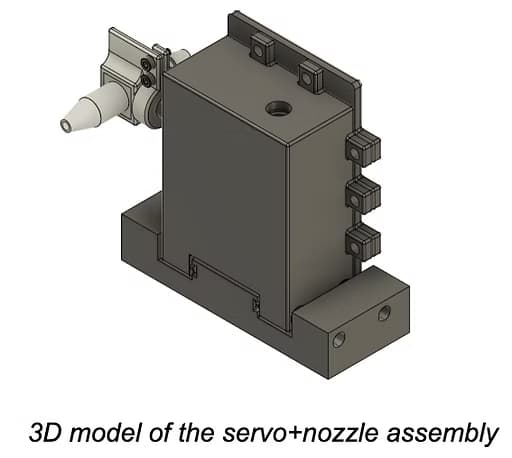
Our watergun is now in its second iteration and was the first robotics system ready for competition. A compact, self-priming pump pulls water through the stabilizer hull and fires a stream up to 20 feet. A waterproof servo enclosure allows automated aiming for precise targeting during autonomous runs.
This year, we are refining the entire watergun setup to work with our new single-shell fiberglass trimaran hull, including redesigned tube routing, improved waterproofing, and a more robust enclosure for the pump. This system embodies our philosophy: build fast, test fast, improve fast.
Skeeball Shooter
Our skeeball shooter consists of two systems: a reliable feeder mechanism and a high-speed flywheel that launches skeeballs toward the target.
- The feeder uses a rotating two-plate design to drop balls into the shooter on command.
- The flywheel spins at roughly 4500 RPM, gripping each ball and accelerating it down the ramp toward the target.
- The rubber flywheel conforms slightly to the ball for better grip, and the rigid aluminum chassis minimizes vibration.
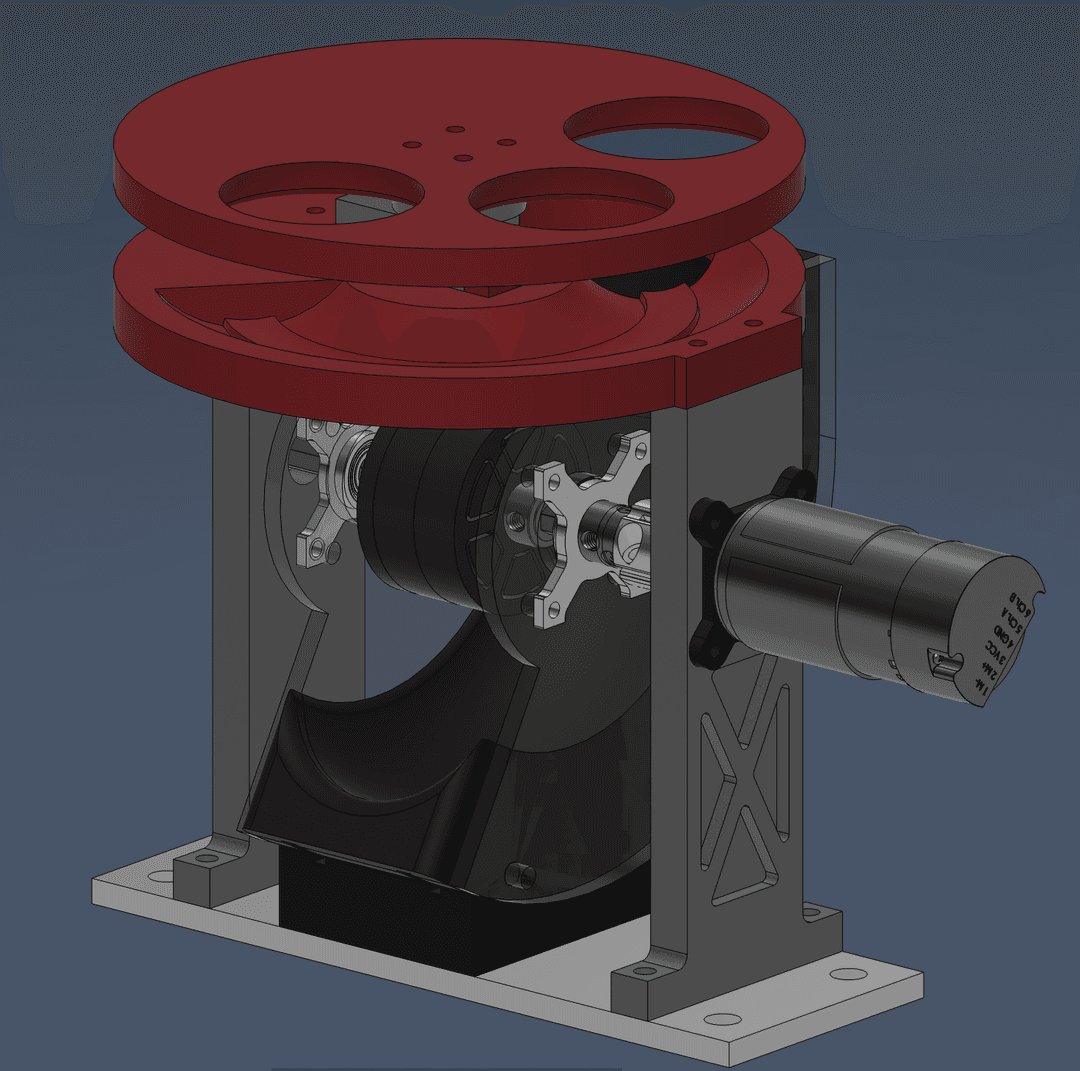
We are currently working on Version 2.5, focused on reducing vibration through drivetrain refinements and condensing the overall footprint so the shooter integrates smoothly with its new neighbor on deck: the robotic arm.
Robotic Arm
Our largest ongoing project is a three-degree-of-freedom robotic arm with a rotating base and two joints designed for object manipulation on the water. Now in its second prototype, the arm is undergoing iterative development across several subsystems, including:
- Custom magnetic encoder finalizing
- Belt tensioning and drivetrain optimization
- Waterproofing strategies for the final design
- Early closed-loop control testing with our 12 V peripherals suite
New for 2026: Acoustic Sensing System
We are developing a microphone-based detection system to identify competition-specific audio cues used for sudden task switching. Robotics owns both the hardware side (waterproof microphone selection, signal conditioning) and the ROS (robot operating system) interface that connects to Software’s Controls subteam. This system is our first venture into acoustic sensing and ROS, and we are excited to bring it to the 2026 competition!
Our Philosophy
Robotics is built on trial, error, and iteration. We prototype fast, test aggressively, and refine based on data. Students interested in mechanical design, machining, CAD, hardware testing, and system integration will find a perfect home here. Although we collaborate with software, Robotics is fundamentally a hardware-driven, build-focused subteam.